Sample: PID controller simulation
Select "File -> New", the following dialogs pops:

Check "Transient-state system" and press "OK" to create a new dynamimc system model project.
Click "Show package list" speed button in the toolbar to show the package list window, click each "+" sign to unfold node.
Click "General -> Function generator", and select the component "Step", keep pressing left mouse button and move to drag the component into new project window, release left mouse button at proper position, then the component image appears, double click the image to input data, or chage component name in "Component" tab.
In the same way add "General -> Controllers -> PID controler" and "General -> Transfer function -> SCurve", if components' position overlaps a pop up window will ask to place again.
When mouse cursor moves over component image of connection, which info will hints at the bottom of window.
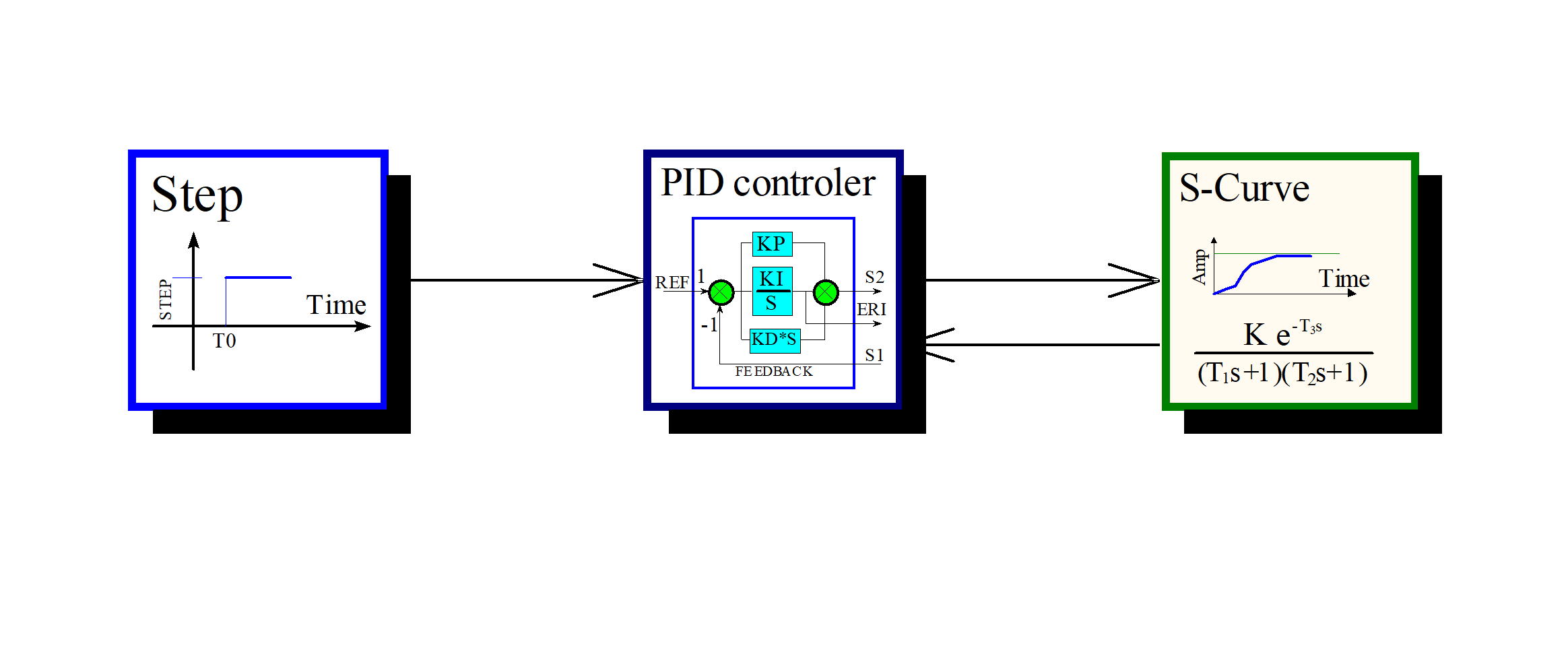
Click the component "Step_0" and "PID_0" in sequence, the platform will take this operation as "connecte", and pop up the connection dialog.

Click the parameter in two component output/input data list: "Step_0->S2" and "PID_0->REF", if the two parameter have same data type, the "Connections" list will add the new connection, when the project window has generate the line. Press "OK" to continue.
Connect "PID_0->S2" and "S-Curve0->S1", ""SCurve_0->S2" and "PID_0->S1".
The whole project system network shows as follow:
Double click each component, input these parameter values:
Step_0
| T0 | 0 |
| ST | 50 |
PID_0
| KP | 2 |
| KI | 2 |
| KD | 1 |
| OP | 1 |
SCurve_0
| KK | 5 |
| T1 | 1 |
| T2 | 1 |
| T3 | 1 |
By now a completed system has been built, save this project and continue to do processes next.
In this project, the component "S-Curve" is the S shage curve, used to simulate controled object.
Select from menu "Projec -> Dynamic system simulation", the follow dialog pops up:

Simulation end time and step time inputed as follow image shows, the time unit is "ms".
Click "Select simulation parameter" button, select parameters in poped up window form.

Click "SCurve_0" in "Component list", then the "Output list" will list all parameters in component SCurve_0. Click S2 of SCurve_0, then click "Add" button at right side to add the parameter to "Plot data list".
All parameters in the list will be recorded in simulation, and ploted as curve. In default the simulation outputs parameter variety with time, the curve X axis is "Time". If want to know the parameter variety with other parameter, user can select that parameter in output list, then click "Change X axis", the X cell parameter of corresponding parameter line will changes to new parameter.
Press "OK" to return previous dialog, and click "OK", the simulation will begin to run, and process bar is shown. After simulation finished, the set curve shows as follows:

This curve can be zoomed or exported to Metafile format.
A FlyCarpet package is a collection of components. A FlyCarpet project can include multiple same state components.
-
Math
General state, mathematical and logical functions.
-
General
Dynamic state, general components for dynamic simulation.
-
Interactive
Dynamic state, interactive components for dynamic simulation.
-
DuctNet
Static state, duct network calculation.
-
Refrigeration
Static state, refrigeration system design and optimization.
-
ECSOptim
Static state, airplane Environmental Control System(ECS, or A/C system) design and optimization.
-
HXFinPlate
Static state, Fin-Plate style heat exchangers design and simulation.
-
VacuumDesign
Static state, steam eject steel furnace vacuum pump design and optimization.
These tools are used to reduce developing time for package and its components so that developers can focus on the core component logic design.
-
FCPBuilder
A fast package and components c++ code generating tool based on inputs, outputs settings and logic processing code.
-
MetaBuilder
A specific metafile builder for FlyCarpet component.